Configure the AKD / AKD2G Drive
The Configuration tab under the EtherCAT: AKD tab is used to configure drives once these conditions have been met:
- The EtherCAT Scan and Association has been performed.
- Your project is compliant with the physical devices on the EtherCAT network.
- You have activated the Online Configuration mode in the EtherCAT Toolbar.
You then have access to all of the AKD configurations and parameters.
- In the Project Explorer, double-click the new AKD Drive or select Configuration from the context menu to open all the parameters linked to it.

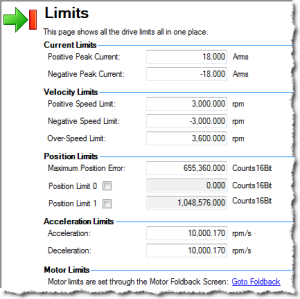
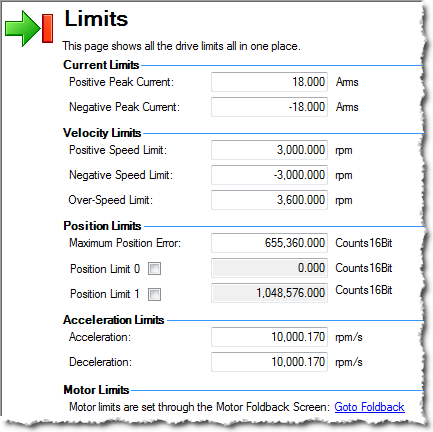
- Define the motion parameters in the Limits tab to configure the limited motor torque, speed, and acceleration
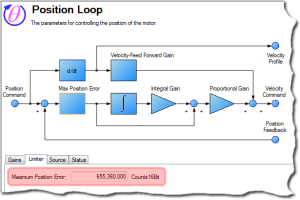
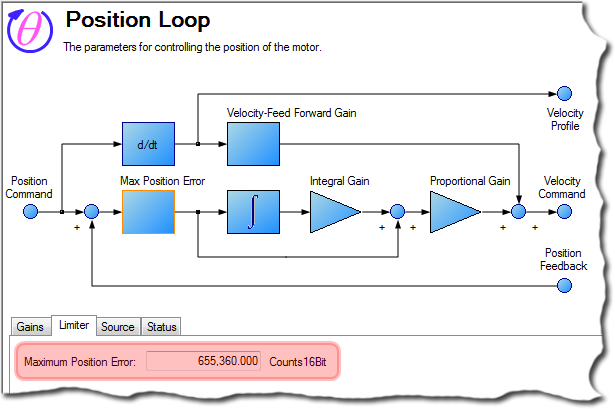
- Define the motion parameters in the Position Loop tab to configure the limiting error.
- Define the resolution of the feedback position in the Feedback tab.
For all feedback types, the motor position feedback sent from the AKD drive to the controller through EtherCAT is normalized to 20 bits/rev or 1048576 counts/rev. - Define the units used for the motion 1:
- For Pipe Network, see Set the Axis Block Position Units.
- For PLCopen, see Axis Data Parameters.
-
-
User units in the PLC language editors are:
- Position: User unit
- Velocity User unit/sec
- Acceleration: User unit/sec2
Several AKD tabs contain units that follow the standard AKD format:
- Position: 16 bits/rev
- Velocity: RPM
- Acceleration: RPM/ Sec
- Position: User unit
- To ensure high performance, define the load for your servo system.
KAS-IDE provides several options for performing the drive tuning: - Slider Tuning - Use the slider to adjust to a designated bandwidth (pre-calculated tuning).
- Performance Servo Tuner - Takes the drive through an automatic tuning sequence.
- Manual Tuning - Used to set gains individually for:
- Current Loop
- Position Loop
- Velocity Loop
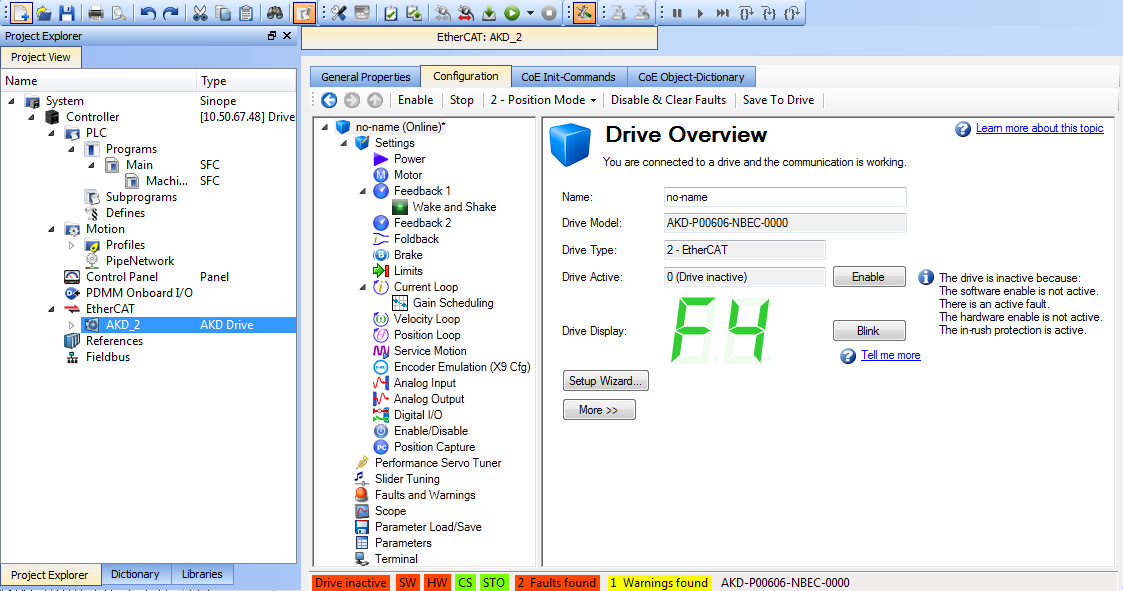
Figure 1: AKD Configuration
- See AKD Drive Configuration for more information about AKD configuration.
- See the FAQs for more information about AKD Firmware Download.
-
-
After your application is downloaded to the controller, you can activate the Online Configuration Mode to configure the drives with the Setup Wizard.
See AKD Setup Wizard for more information.






